7 レースカーとCFD
7.1 CFDとは
CFDとはComputational Fluid Dynamicsの略で, 流体の数値シミュレーションのことを指す. 風洞実験と比べてコストがかからず, 形状の最適化やコンセプトの比較がしやすいため, 現代の空力設計においてシミュレーションは欠かせないツールとなっている.
CFDは, 正しく設定されてないと間違えた結果, 傾向に行きついてしまい開発そのものの方向性を見失い兼ねない. また正しくセットアップされていても, 捉えきれない現象, 現実との乖離は出ることがある. そのためF1チームではCFDで結果が良好なデザインのみ風洞でテストするのではなく, 過去に風洞ではCFDと比較してこの流れ場の挙動が違ったからこの形状も風洞に送ってみよう, などという意思決定が取られることもある. しかし学生フォーミュラにおいてこの開発フローを再現することは, 適切な風洞実験を実施するという観点から困難である. そのためCFD, 及び実車走行データをもとに空力開発を進めているチームが多いだろう. またアクセスできる計算資源にも限りがあり, 適切なCFDの設定が困難である場合もある. ここで問題となるのが, 何に重点をおいてシミュレーションを実施するかになってくる.
どの程度の妥協が許され, その妥協は結果にどう影響するか. この点を理解しておけば, ある程度粗いセッティングも有用なデータとなりうる. そのため本稿では, CFDのアルゴリズムや理論, 数学にはあまり深く入らず, レースカーにおけるCFDセッティングの基本、そして正しくないセッティングをしたときに出る結果への影響に焦点を当てていきたい. なおCFDの理論を詳しく勉強したい方は, 梶島先生の「乱流の数値シミュレーション」, またはYoutubeのFluid Mechanics 101をお勧めする.
7.2 CFDの基礎知識
CFDには大きく分けて3種類, DNS, LES, そしてRANSが存在する. この章では各々の特徴を最低限必要な知識に絞り紹介する.
7.2.1 DNS
Direct Numerical Simulationの略. CFDの中では最も精度が高いシミュレーション方法であるが, レースカーにおける空力開発でDNSを用いることはない. その理由は必要とされるメッシュサイズにある. 特に高Re数流れの場合, 要求されるメッシュ数はReに対して指数関数的に増えていく. これは流れの中の最小渦スケール(コロモゴロフスケール)がより小さくなっていくからである. そのためDNSでは現状高Re数での複雑な形状の計算はされず, Re=10e5程度の有限翼のシミュレーションなどが限界である. ただし, 一切のモデル化を行わず(連続体近似など流体力学を構成するうえでの近似はここでは除く)完全にN-S方程式を解くため, ある意味理想的な仮想実験環境を構築することができ, そのために乱流の物理を明らかにするなどの研究用途では盛んに用いられる.
1つ, 余談としてDNSを用いると乱流の瞬時値を正確に予測できるのか?という話がある. 梶島先生の「乱流の流体シミュレーション」によるとできない. これは乱流がカオス現象であり, 完全な初期値がわからない限り, その先の現象を予測できないからである. そのため, DNSを用いたとしても, 得られた速度や圧力のデータを空間, 時間で統計処理したものを扱うことで乱流の特徴を明らかにする, という手法が一般的である.
7.2.2 LES
Large Eddy Simulation, LESはコロモゴロフスケールより大きいとあるスケールを指定し, それ以上大きいスケールはN-S方程式より, そしてそれより小さいスケールの流れはモデル化するという手法である. この手法を用いてもなお必要なメッシュ数は膨大であるが, 近年の計算機の発展に伴い, レースカーに設計にLESでの計算を用いることは不可能ではない. 特に強い渦構造は非定常性が強い場合が多く, LESとRANSによる結果の差が顕著に見られることもある.
7.2.3 RANS
7.2.4 乱流モデル
7.2.5 最近の話
近年はGPUの発展もあり, 格子ボルツマン法を用いた大規模計算の例を見るようになった. 精度こそわからないが, F1のモデルなども格子ボルツマン法を用いて解析している例もある. 触ったことがないので紹介だけになるが, GPUの発達に伴い今後主流になる可能性はある. 格子ボルツマン法の利点の1つとしてその並列効率があげられる. うまくプログラムを組むことでCPUと比べてかなり大規模な計算が実施できるようになったり, 高速化できるという利点がある.
またDetached Eddy Simulation(DES)というRANSとLESをハイブリッドさせたシミュレーションは, 120 core程度の計算資源と十分な計算時間があれば現実的に手が届きそうな範囲に位置する. DESに関して詳しく知りたければ, こういう論文やこういう論文をお勧めする. 特にタイヤの後流による影響度を測りたいときは, DESを用いて非定常解析をすることで, より正確な傾向を見ることができる. なお, DESが必ずしもRANSより風洞実験の結果に近い結果になるという確証はない. DESのチューニングにはより多くの計算資源を要するため, 通常はRANSのセッティングを引き継いだ状態で解析を回すことが多い. だがしかし, RANSのモデルのチューニングが必ずしもDESにおいても適切な値とは限らないために, このようなことが発生する. そのためDESの結果を真として捉えるのではなく, RANSではこうなっているがDESではこうなっている. 実際にはDESの流れ場に近いかもしれない, みたいな参考程度とすることをお勧めする. 計算資源にゆとりがあるチームであれば, 用途に応じて様々な解像度のシミュレーションを使い分けるといいだろう.
7.3 CFDのセッティング
RANS, 及び乱流モデルについては前述したとおりであるが, その他CFDのセットアップには多くのパラメータがある. とりあえずデフォルトの状態で使用するだけでは, 不必要な計算資源の浪費や十分でない精度の解析になる可能性があるため, 本章では具体的なCFDのセットアップについて説明する.
7.3.1 乱流モデルとメッシュ
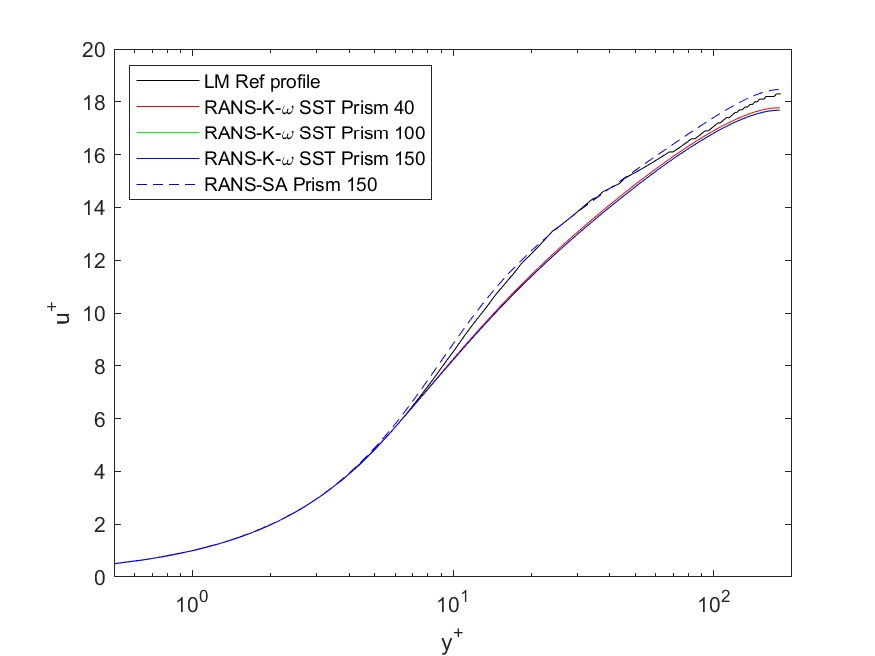
乱流モデルは, K-ω SST一択で問題ない. それ以外のK-εモデルやK-ωモデル, SAモデルも選択はできるだろうが, 基本的にK-εとK-ωのお互いの長所を融合させたモデルがK-ω SSTモデルであり, これ以外を選択する利点があまりない. ただレースカー以外の流れ場, 特に圧力勾配に変化が少ない場合はSAモデルのほうが正しく流れ場を予測できる可能性がある. 例えばチャネル乱流に準ずる流れ場をSAモデルとK-ω SSTモデルで解くと, 境界層の粘性層からLog法則への変化がDNSと比較してK-ω SSTモデルでは下回った結果が出る.
7.3.2 計算領域と境界条件
7.3.3 ソルバー
7.3.4 初期条件
計算を回すうえで, 初期条件を決める必要もある. 決めるべき初期条件は, 速度場, 圧力場, そして乱流モデルに関する量になる. 本来最終的に収束した解に初期値依存性はないため, どのような初期条件から始めても問題はないはずであるが, 初期条件は解の収束までの時間に影響を及ぼす.
一番シンプルな初期条件はすべてのセルを流入速度と同じように設定する, またはすべて0の状態から始めるの2つだろう. 自身の経験に基づくと, 境界層近辺の流れを非物理的な速度に設定してしまうと, 速度が下がるまでに時間がかかるため, すべて0の状態から始めるほうが結果として収束までの時間が少なかった. 圧力はReference value, 0で設定しておく.
より高度な初期条件設定としては, 初めの100ステップなどを非粘性ソルバーで解くという方法だ. 非粘性ソルバーでも, 大まかな流れ場を形成するのには役に立つ上に流れ場の成長が速いため, FluentやStarCCM+にはこの機能がデフォルトでついている. ほかにももし似ている形状の流れ場の解が存在する場合, その流れ場を外装するという方法もある. 変更が大きくない場合, このアプローチは非常に有効であり, 収束速度は飛躍的に向上する.
乱流モデルに関する諸量も設定する必要がある. kとε, またはωという2つの変数があるため, 境界条件も2つ定める必要がある. 一般的にはKのnormを速度の主成分で正規化した乱流強度, およびK/ε(=ω)を定めることが多い. k, 乱流強度は平均の流れ場に対しての変動成分の大きさを指す. 風洞実験との比較であれば, この値は1%を下回ることもあるが, 一般的に外を走るレースカーの解析には5%を用いることが多い. これにより, 速度の主成分の5%程度の”揺らぎ”が初期条件に含まれる. この値は層流から乱流への遷移などに影響し, 乱流強度が小さいと遷移点がモデルのsurface上で発生し解が不安定になる. 5%であれば初めから境界層は乱流境界層として発達するため流れ場が安定する. ある意味, 風洞実験におけるTripping wireのような役割を果たしているといえる.
7.3.4 タイヤと地面の粗さモデル
最後に少し発展的な話題にも触れよう. タイヤや地面は決して完全に滑らかなわけではなく, 表面粗さが存在する. そしてこの表面粗さは空力に対して少なくない影響を与えることが知られている. 具体的には表面が粗いほど境界層が厚くなり, タイヤの剥離点の移動や後流の形にも変化がみられる. 地面の粗さは地面近くに渦がある場合に強く影響を与え, 粗い地面の上では渦のエネルギーは境界層によってより散逸しやすくなるため, 結果として渦の寿命が短くなるなどの影響がある. ただし, 現状万能な地面の粗さを再現できるモデルは存在せず, 学術的にも大きな課題となっているため, 風洞実験でのPIVなど, お手本となるデータがない場合は, 特にいじれる場所ではない.
7.4 最後に
学生フォーミュラであっても, 理想的な話をするとCFDの中身を正しく理解したうえで, セッティングを見ることのできる人材がチームに1人はほしい. だがしかし, 多くの場合が設計者が年度初めにCFDを設定して, その設定を使用し続けることが多いと思われる. もちろん様々なCFDの設定を試しながら学習することをお勧めしたいが, 時間, 資源に余裕がない場合は上記のセッティングを活かしてみてほしい.
改訂記録
04/09/2024 初版投稿